Lab 7 - Biblioteka Open Motion Planning Library w Robot Operating System 2

![]()
Metody i algorytmy planowania ruchu - laboratorium
Lab 7 - Biblioteka Open Motion Planning Library w Robot Operating System 2

1. Wprowadzenie
Celem zajęć jest zapoznanie się z biblioteką Open Motion Planning Library, która udostępnia implementację wielu popularnych algorytmów planowania ruchu. Dokumentacja biblioteki znajduje się na stronie: http://ompl.kavrakilab.org/
Lista dostępnych algorytmów planowania ruchu dostępna jest tutaj: http://ompl.kavrakilab.org/planners.html
W Robot Operating System modułem wykorzystującym bibliotekę OMPL jest moduł MoveIt: https://moveit.ros.org/
Warto również zapoznać się z przykładami zastosowania biblioteki
OMPL: http://ompl.kavrakilab.org/gallery.html
i porównaniem poszczególnych algorytmów dla różnych problemów planowania
ruchu: http://plannerarena.org/
Źródła biblioteki znajdują się na Github: https://github.com/ompl/ompl
Można tam znaleźć wiele przykładów planowania ruchu w C++ i Python.
⚠️ Pamiętaj, aby w każdym nowym terminalu zanim rozpoczniesz pracę skonfigurować środowisko ROS komendą
source /opt/ros/humble/setup.bashlubsource install/setup.bash
2. Przygotowanie paczki w ROS
Zainstaluj niezbędne biblioteki w systemie:
sudo apt-get install ros-humble-nav2-map-server ros-humble-nav2-lifecycle-manager libompl-dev ros-humble-moveit-planners-omplPobierz paczkę z zadaniami z repozytorium github:
cd ~/ros2_ws/src
git clone https://github.com/BartlomiejKulecki/ompl_example_2d
git clone --branch humble https://github.com/dominikbelter/example_mapsNastępnie skompiluj pobraną paczkę i odśwież przestrzeń roboczą:
cd ~/ros2_ws
colcon build --symlink-install
source install/setup.bash3. OMPL
Główny program znajduje się w pliku ompl_example_2d.cpp
Klasa Planner2D wykorzystuje bibliotekę OMPL do
zaplanowania ruchu pomiędzy dwoma punktami. Pozycja początkowa robota,
przestrzeń poszukiwań zdefiniowane są w metodzie
configure(void).
Za planowanie ruchu odpowiedzialna jest metoda planPath.
W tej metodzie tworzony jest planer OMPL i definiowany jest problem. Do
sprawdzenia stanu robota służy funkcja
isStateValid(const ob::State *state). Sprawdza ona czy
aktualny stan (w naszym przypadku (x,y) jest dopuszczalny). W
podstawowej wersji przeszkoda zdefiniowana jest jako prostokąt:
// define the obstacle
if (coordX->values[0]<5.1 && coordX->values[0]>5.0){
if (coordY->values[0]<4.0 && coordY->values[0]>-5.0){
return false;
}
}Uzyskana ścieżka jest konwertowana do typu ROSa w metodzie
extractPath.
W naszym przykładzie wykorzystujemy bibliotekę OMPL. ROS służy nam
tylko do wizualizacji i wymiany danych pomiędzy modułami. Węzeł ROS
tworzony jest w pliku ompl_example_2d.cpp. W
tym pliku subskrybowany jest topik /map (wykorzystany
później w zadaniach) i publikowana jest zaplanowana ścieżka do topika
/ompl_example_2d/planned_path. Planowanie ruchu odbywa się
w pętli ROS co 1 sekundę.
W paczce ompl_example_2d znajduje się również plik
launch uruchamiający oprogramowanie i niezbędne dodatki
(map_server wczytujący przykładową mapę zajętości,
RViz) i węzeł do planowania ruchu
ompl_example_2d_node.
Uruchomienie przykładu następuje po wykonaniu poleceń:
ros2 launch ompl_example_2d ompl_example_2d.launch.pyPowinna pojawić się wizualizacja zaplanowanej ścieżki, która zmienia się co 1 sekundę (wizualizacja mapy zajętości powinna zostać wyłączona ponieważ nie jest brana pod uwagę podczas planowania ruchu):
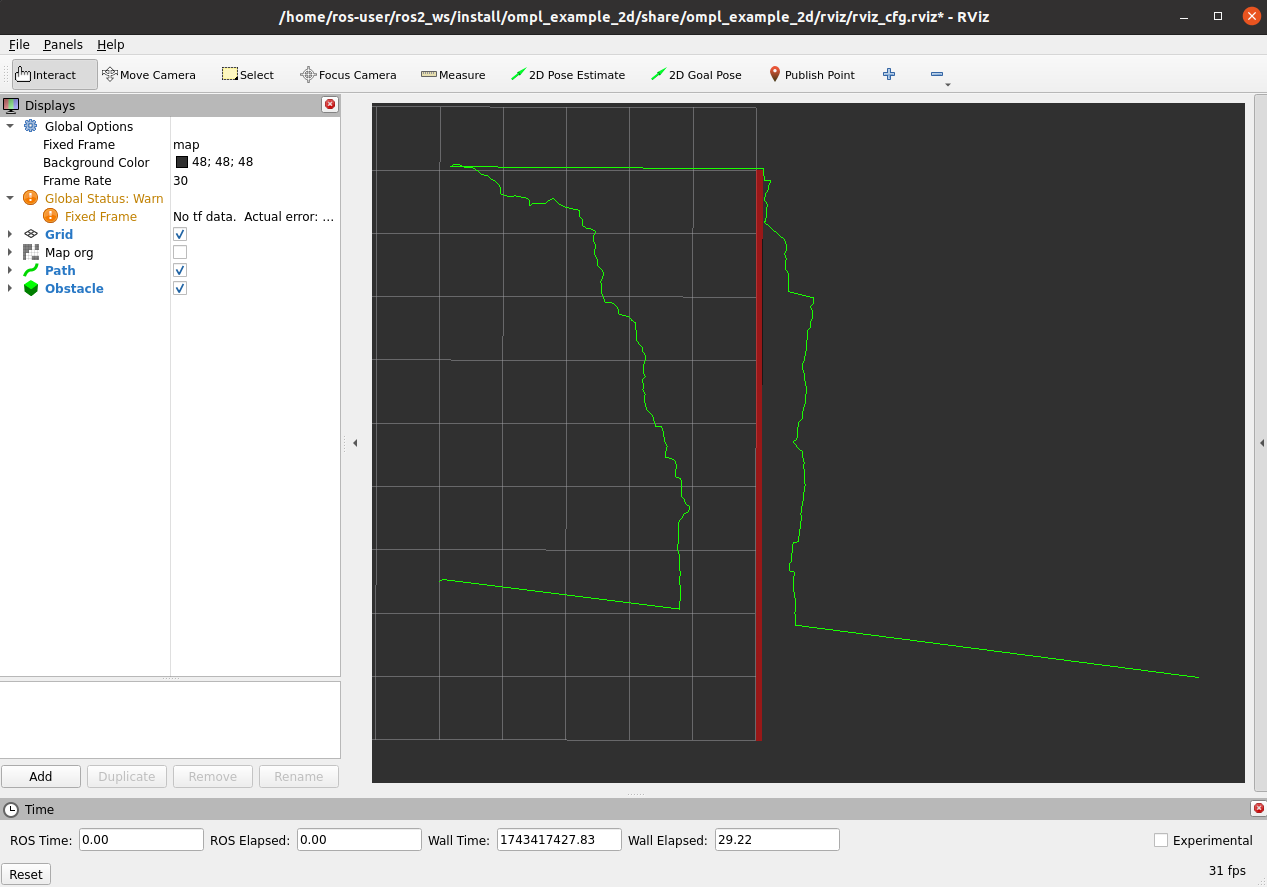
Na rysunku czerwoną linią zaznaczono przeszkodę, która jest omijana przez planer ruchu.
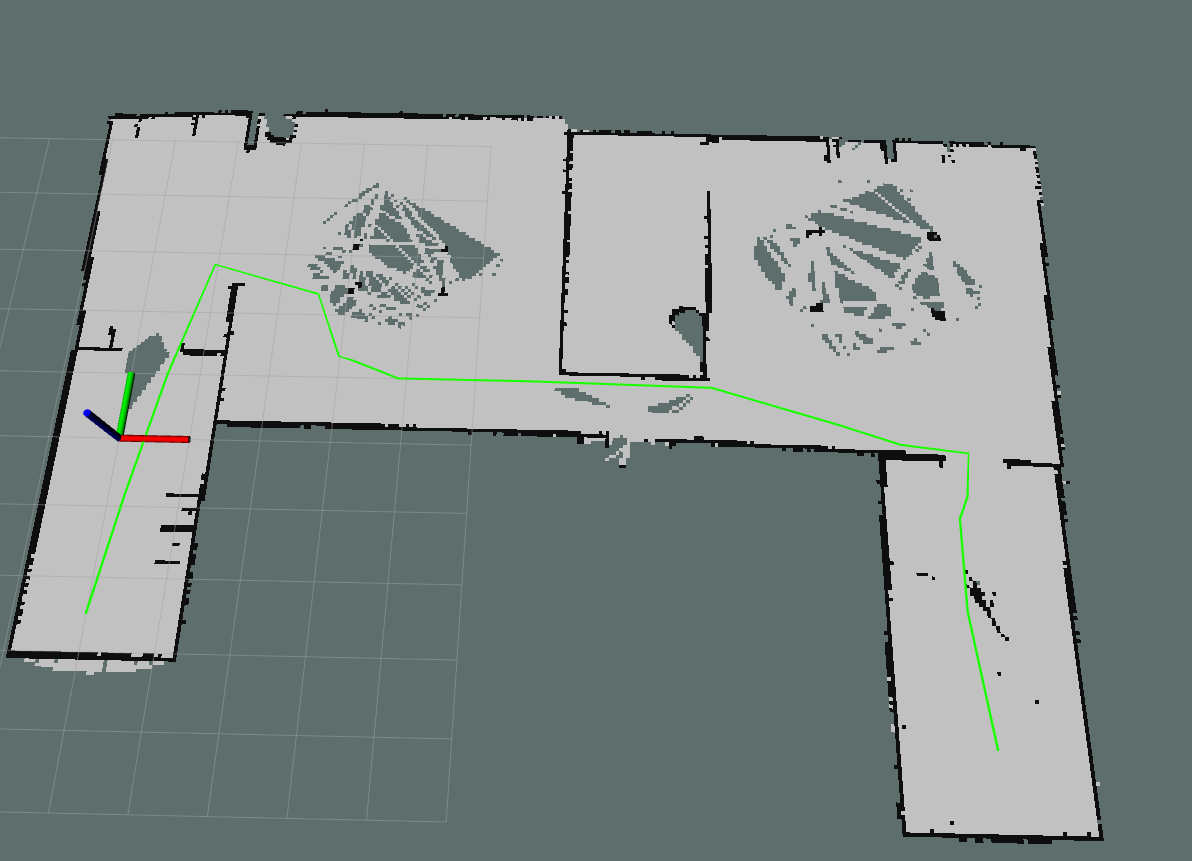
🔨 Zadanie 3.1
Zmodyfikuj metodę isStateValid, tak żeby podczas
planowania ruchu pod uwagę była brana wczytana mapa zajętości.
Przykładowy wynik:
Pobranie mapy przez węzeł zajmuje trochę czasu - musi ona zostać pobrana z topika. Zanim to się stanie, pole
occupancyMap.datama rozmiar 0. Odwołanie do tej struktury powinno odbywać się dopiero po sprawdzeniu rozmiaru mapy (poleoccupancyMap.info.widthioccupancyMap.info.height)
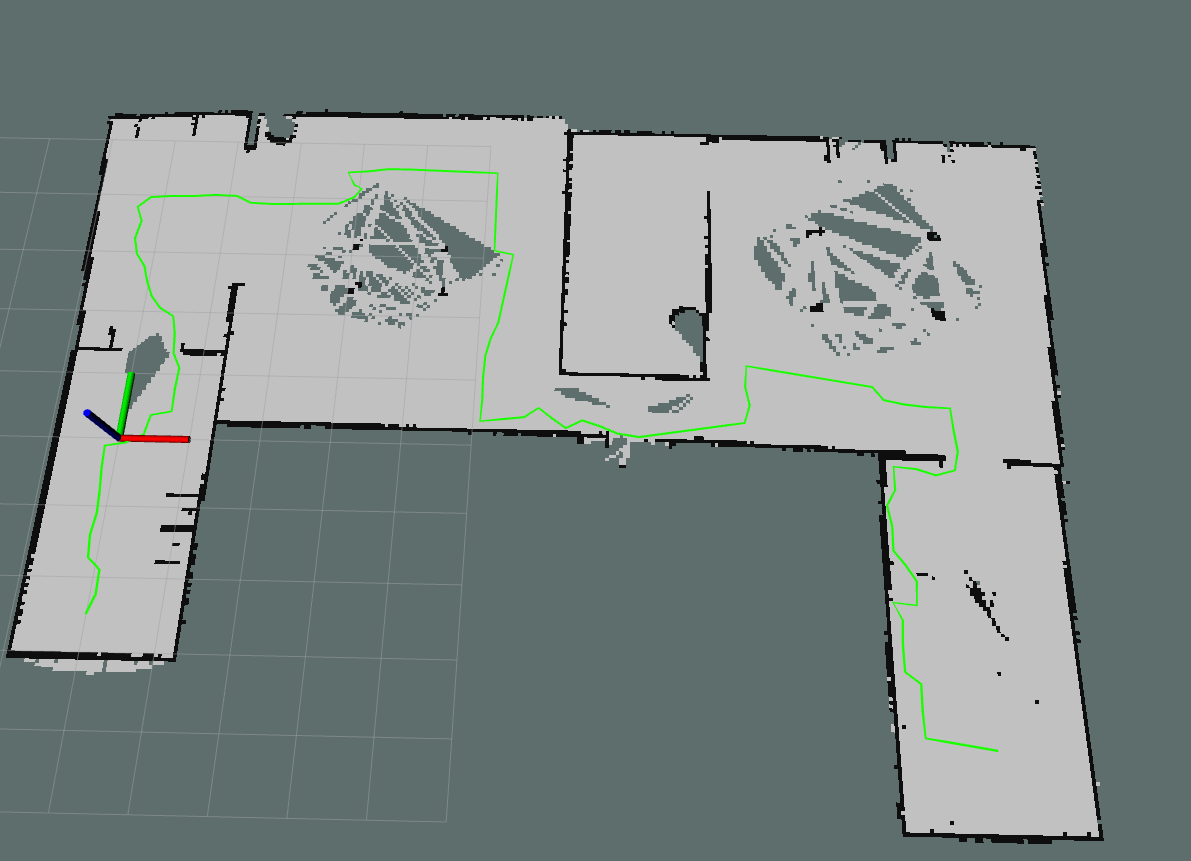
🔨 Zadanie 3.2
Zmodyfikuj kod, tak żeby do planowania ruchu wykorzystana została
metoda LazyPRMstar. Przykładowy wynik:
🔨 Zadanie 3.3
Zmodyfikuj kod, tak żeby planer uwzględniał rozmiar robota (10x10 komórek mapy zajętości) i poruszał się również po komórkach nieznanych (-1).
🔨 Zadanie 3.4 (dla chętnych 💪)
Zmodyfikuj kod, tak żeby planer uwzględniał orientację robota podczas
planowania ruchu:
https://ompl.kavrakilab.org/workingWithStates.html
Wykorzystaj metodę setMotionValidator: https://ompl.kavrakilab.org/stateValidation.html
żeby ograniczyć możliwą zmianę orientacji w jednym kroku maksymalnie o
30 stopni.